46
saia-pcd.com
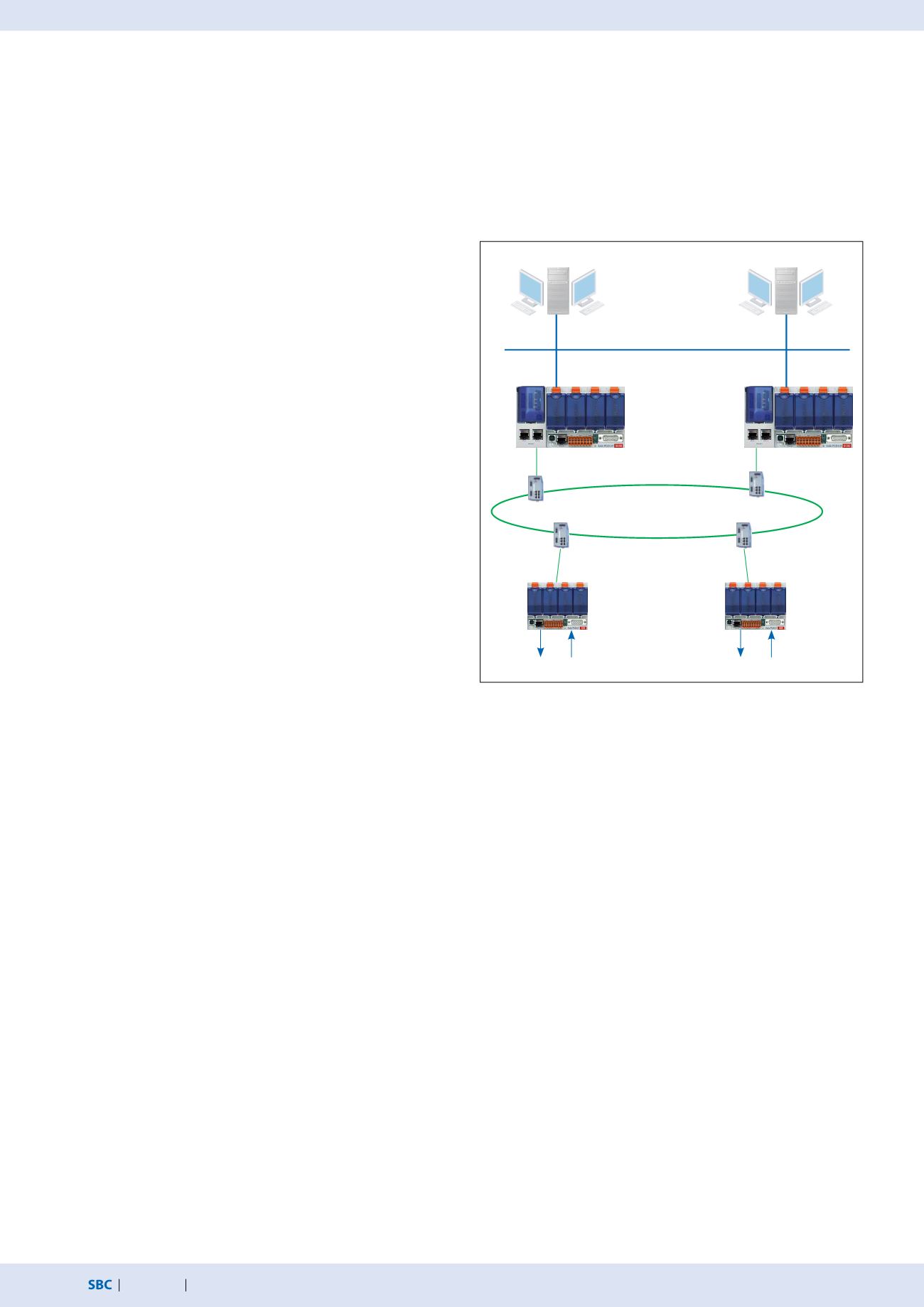
Ethernet
SCADA 1
SCADA 2
Contrôleur de secours
Présentation du système Standby
Introduction
Les automates Standby PCD3.M6880 sont destinés à créer des solutions d’automatisation redondantes permettent de garantir le
fonctionnement en continu des systèmes et des processus.
Les systèmes standby (d’automatisation redondante)
de SBC possèdent les caractéristiques suivantes :
Basés sur la gamme PCD3 modulaire et robuste, ils utilisent
des modules standard.
Architecture de système simple, réduction des coûts.
Processeurs standby avec entrées/sorties déportées, Ethernet
partagées évitant le doublement des entrées/sorties et
capteurs/actionneurs.
Entrées/sorties déportées programmables permettant de
créer des nœuds décentralisés intelligents afin de fournir
une sécurité supplémentaire.
Le réseau utilise les composants Ethernet standard et peut
fonctionner sur un réseau TCP/IP Ethernet standard avec
d’autres services.
Ingénierie et mise en service simples grâce au gestionnaire de
projets Saia PG5® qui permet de générer automatiquement le
projet et la configuration. Les programmes redondants sont
identiques et créés qu’une seule fois.
Commutation ininterrompue entre l’appareil standby et
l’appareil actif.
Les contrôleurs standby disposent de deux processeurs.
Le premier exécute le programme redondant et surveille
le PCD actif, le deuxième exécute les autres processus non
redondants. Cela augmente significativement la performance
et la flexibilité du système.
Fonctions de diagnostic complètes destinées à faciliter la mise
en service et la recherche des défauts.
Terminologie
Les définitions suivantes permettent de mieux appréhender les propriétés et les principes de fonctionnement :
Contrôleur standby
Contrôleur PCD3.M6880 prenant en charge la fonctionnalité de secours.
PCD principal
PCD qui devient l’appareil actif par défaut lors de la mise sous tension du système en fonction de la configuration.
PCD secondaire
PCD qui devient l’appareil de secours par défaut lors de la mise sous tension du système et qui prend en
charge la commande active uniquement en cas de panne dans l’appareil actif.
PCD actif
PCD dont le CPU1 est en mode actif et qui exécute le programme redondant et contrôle les entrées/sorties
(modules RIO PCD3.T668).
PCD standby
PCD dont le CPU1 est en mode de secours. Il n’exécute pas le programme redondant et les sorties
(modules RIO PCD3.T668) ne sont pas contrôlées par cet appareil.
CPU principal
CPU0 du PCD principal ou secondaire qui exécute le programme non redondant. Ce programme peut être
différent sur les appareils principal et secondaire.
CPU redondant
CPU1 du PCD principal ou secondaire qui contient le programme redondant. Ce programme doit être le
même sur les appareils principal et secondaire. Ce CPU peut être en mode actif et exécuter le programme
redondant ou en mode de secours et contrôler le PCD actif.
Réseau IP
à fibre optique en boucle
Disposition typique d’un système de redondance avec deux appareils de secours
PCD3.M6880 et des modules Smart RIO Ethernet PCD3.T668.
Secondaire
Principal
Processus E/S
Processus E/S
Système SCADA
Contrôleurs standby
PCD3.M6880
Modules Smart RIO
PCD3.T668
Standby Controller


