51
saia-pcd.com
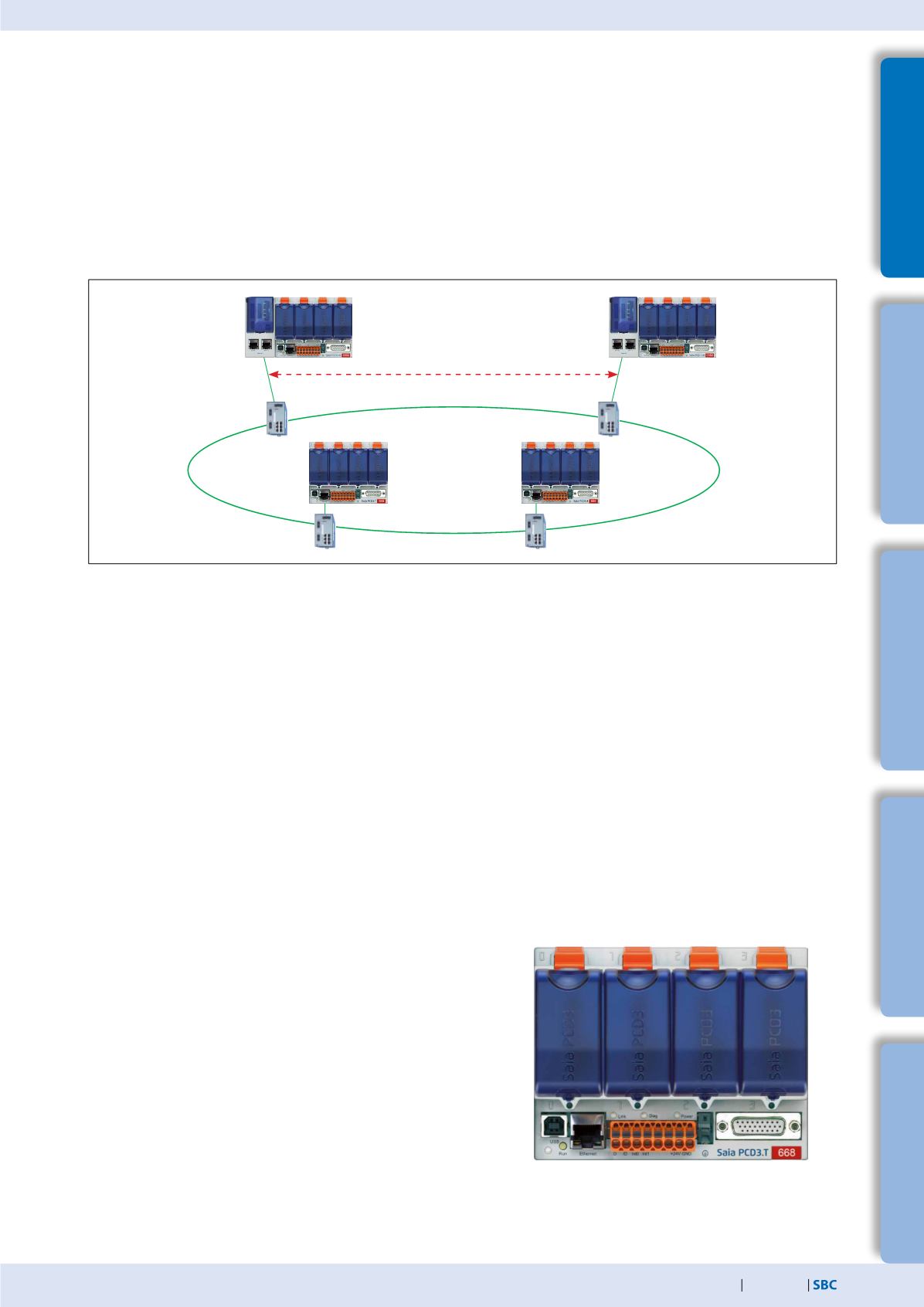
Contrôleur de secours
5
Composants d'armoire
électrique
4
Enregistrement
de consommations
3
Régulateurs d’ambiance
spécialisés
2
Commande
et surveillance
1
Automatisation
Critères de commutation
Chaque PCD standby (CPU1) envoie un télégramme « Keep Alive » à son partenaire à des fins de supervision.
Le PCD Standby commute sur ACTIF si :
Aucun télégramme « Keep Alive » n’a été reçu pendant la période « Keep Alive Timeout » définie avec le configurateur du dispositif
du CPU redondant. La valeur du paramètre « Keep Alive Timeout » peut être comprise entre 100 et 500 ms. Le délai de commutation
maximal est donc <100 à 500 ms.
L’état du PCD ACTIF n’est pas RUN ou STOP (arrêt de l’envoi du télégramme Keep Alive).
Une commande de commutation manuelle a été exécutée via le programme utilisateur ou manuellement.
1.3.2
Module RIO PCD3.T668 pour automates Standby
Structure du PCD3.T668
Les entrées/sorties déportées dumodule PCD3.T668 sont exclusivement destinées à être utilisées avec les automates Standby PCD3.M6880.
Exceptée la fonction de redondance, elles prennent en charge les mêmes propriétés/fonctions que la station d’E/S déportées PCD3.T666.
Les entrées/sorties déportées standard des modules PCD.T665 et PCD3.T666 ne peuvent pas être utilisées avec des automates Standby.
Il peut être utilisés comme une station d’E/S locales simple ou comme
une station d’E/S intelligente programmable
Il peut être programmés avec PG5. Les tâches importantes ou avec
des délais pressants peuvent être directement traitées dans le module RIO
Les programmes utilisateur des modules RIO sont gérés de manière centralisée par
le Smart RIOManager (PCD) et téléchargés automatiquement dans les modules RIO
L’échange des données utilise le protocole Ether-S-IO de manière efficace.
Configuration simple avec le configurateur de réseau RIO
Communication croisée avec d’autres systèmes PCD via Ether-S-Bus (FBoxes)
Les modules de communication intelligents (M-Bus, DALI, par exemple)
sont pris en charge
Autres protocoles de communication (Modbus, par exemple) via Ethernet
TCP/IP et également par l’interface RS-485 embarquée avec le PCD3.T666
Serveur d’automatisation intégré
Synchronisation et supervision des données (Keep Alive)
Synchronisation des données et cycle de programme :
Les medias PCD utilisés (R, F, T/C, BD/TX) du CPU1 redondant sont cycliquement synchronisés avec les PCD actif et Standby.
Le délai de synchronisation de tous les medias PCD est généralement inférieur à 200 ms. Ce délai peut être diminué en conséquence si
une seule partie des medias PCD est utilisée. Le temps de cycle de programme est calculé comme suit :
Temps de cycle total = délai d’exécution du programme + délai de synchronisation des données
La valeur maximale pour une application étendue peut être calculée comme suit : 100 ms + 200 ms = 300 ms max.
Pour les applications plus petites, où un volume moindre de medias PCD est utilisé, le temps de cycle peut être réduit en conséquence.
Standby Controller


